Se ha realizado una librería en microblocks para un sencillo control de movimientos del robot.
Tiene una orden de configuraciones de pines dónde colocar los pines a los que va conectado los servomotores, el izquierdo y derecho.

y otra orden de definición de movimiento y velocidad, dónde tiene menú desplegable para tipo de moviento y velocidad.

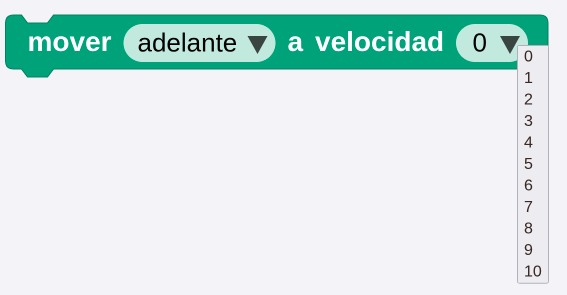
Se ha de indicar que los giros no son tales, son en realidad pivotajes, que no es más que la rotación del robot sobre si mismo.
Además podemos modificar los parámetros de velocidad de cada acción de 0 a 10. Si indicamos en cualquier acción velocidad 0 el robot se para.