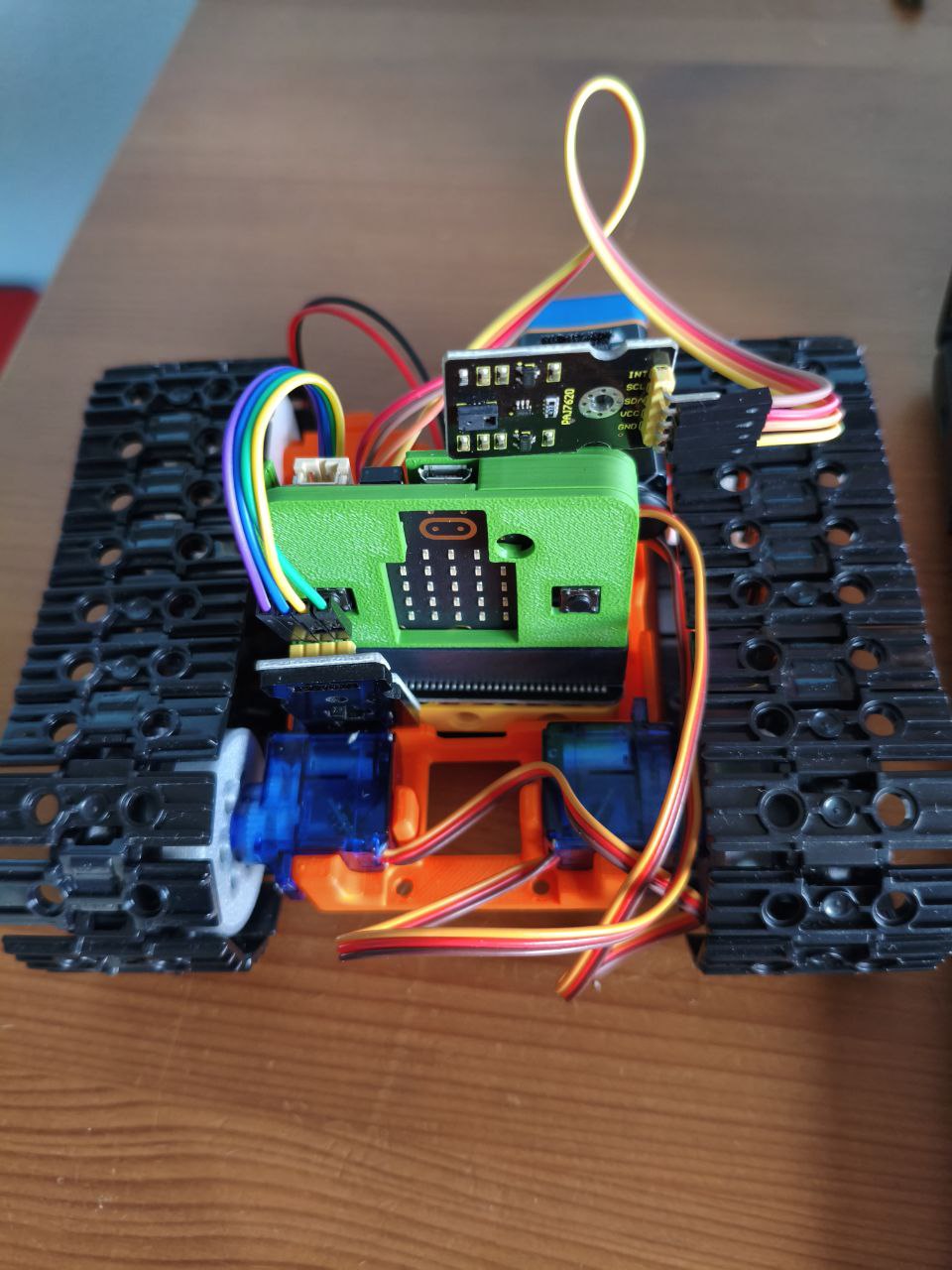
Se basa en un robot oruga con tracción trasera, con dos servomotores de rotación contínua. Todo ello gobernado por una placa micro:bit o microSTEAMakers, con shield de conexionado y alimentación por bateria li-on en formato pila 9V. Como sensores tiene los propios de cada placa y se le han añadido dos sensores con conexionado I2C: sensor de gestos y sensor de color.